Visión Artificial
Aplicaciones
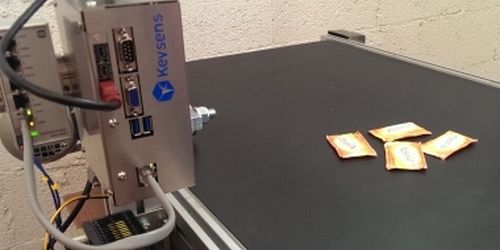
Los sistemas Keysens permiten desarrollar una gran variedad de aplicaciones de visión artificial.
Los resultados se integran con robots para manipulación, con HMIs para presentación y clasificación,
o con PLCs para actuar sobre los objetos inspeccionados.
Ejemplos:
 Detección de sobres de azucar para pick-and-place.
Detección de sobres de azucar para pick-and-place.- Detección de teselas para confección de mosaicos.
- Detección de piezas de fontanería para montaje.
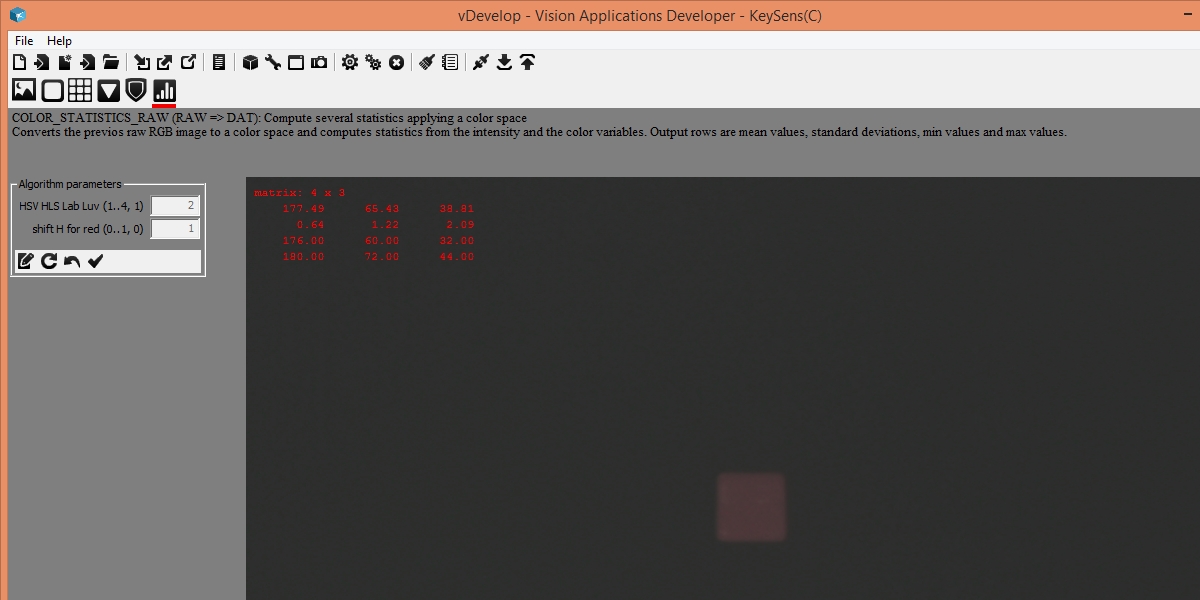
- Medición y clasificación de color en bandejas de mosaicos.
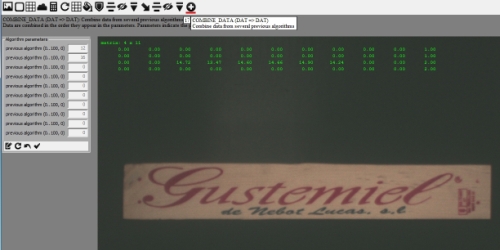
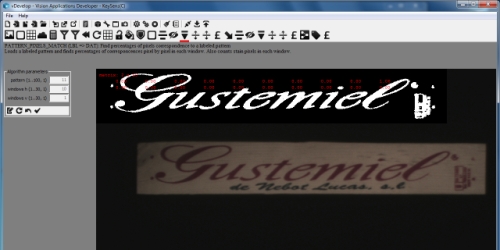
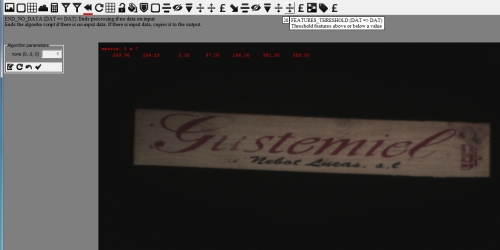
- Verificación de la impresión sobre listones.
- Detección de nudos en listones para imprimir.
- Detección de piezas cerámicas desconchadas.
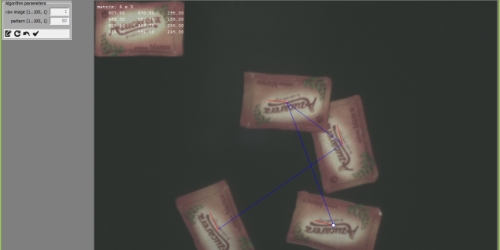
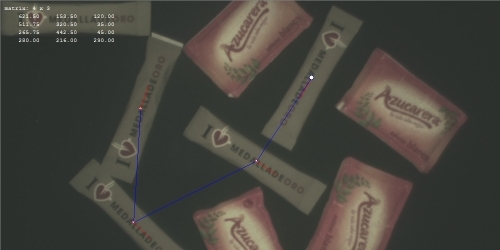
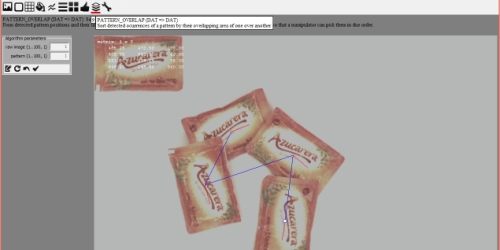
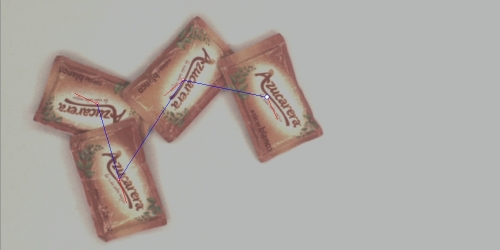
Detección de sobres de azucar
Los sobres de azucar son flexibles y no presentan siempre un patrón plano. Se detecta su orientación para situarlos alineados en las cajas. Se detectan sobres solapados y el correcto orden de agarre, primero el superior, después la siguiente, etc. Se puede cambiar el modelo de sobre y trabajar con varios modelos a la vez, distinguiéndolos como clase 1, clase 2, etc. Los resultados se comunican a un robot, que realiza el agarre. El sistema de visión está calibrado con el robot.
Calidad de la impresión sobre listones
Se detectan errores de impresión: zonas que no se han marcado bien y manchas. Se localizan los textos mediante segmentación por color. Se compara cada texto con su modelo de forma tolerante a alargamientos y rotaciones. Las medidas proporcionadas son los porcentajes de zonas perdidas y de manchas. Se clasifican los listones en aceptables y desechables. Se envían los resultados a un actuador, que saca los rechazados de la línea.

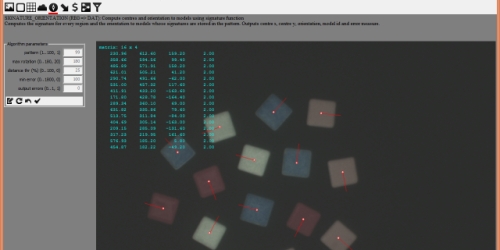
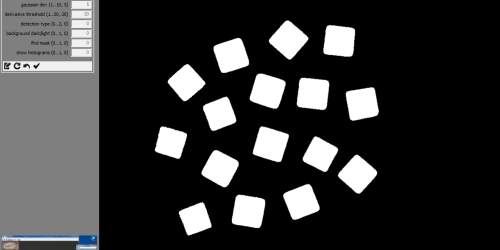
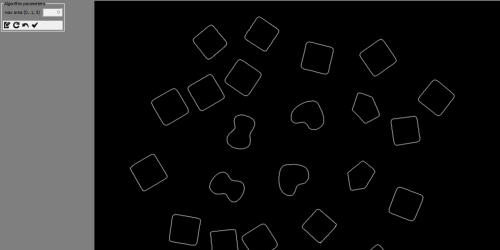
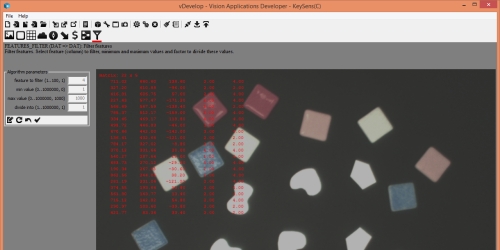
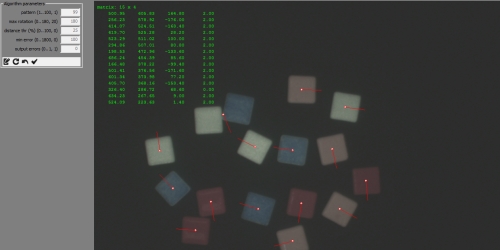
Confección de mosaicos
Se realiza una detección de objetos segmentando las imágenes. Las formas se clasifican según unos modelos conocidos usando funciones de signatura, con ello se obtienen las orientaciones con gran resolución angular. Además, las formas no reconocidas, como objetos rotos, pegados o solapados, se rechazan. En una segunda clasificación se clasifica el color de cada objeto según colores definidos, ello permite rechazar colores no reconocidos. Finalmente se comunican los resultados a un robot manipulador, con el que el sistema de visión está calibrado: posición x, posición y, orientación, atributo de forma y atributo de color.