

Visión Artificial
Software
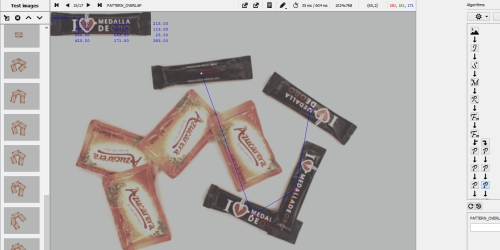
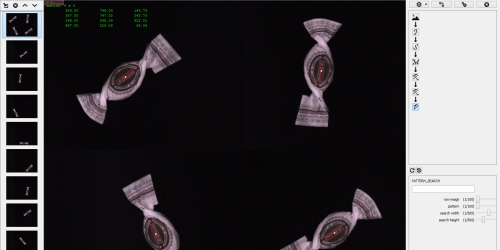
La clave de cualquier aplicación de visión son los algoritmos que se aplican a las imágenes,
que van obteniendo información cada vez mas elaborada hasta llegar al resultado final.
El simulador es una aplicación de escritorio para Ms Windows 7/8/10.
Permite desarrollar proyectos de visión y probarlos sobre imágenes grabadas
antes de descargarlos a los procesadores de visión, donde se ejecutarán en tiempo real.
Los runtime son aplicaciones de tiempo real para controlar cámaras o perfilómetros
y aplicar proyectos de vision. Vienen instalados en los Procesadores de Visión.
 vAlgorithms: colecciones de algoritmos de visión.
vAlgorithms: colecciones de algoritmos de visión.- vDevelop: simulador/desarrollador de proyectos de visión.
- RuntimeGigE, RuntimeGigEUser, RuntimeLin: runtimes para visión 2D (cámaras matriciales o lineales).
vAlgorithms
Colecciones de algoritmos para solucionar tareas de visión artificial.Se presentan en DLLs y se agrupan en categorías.
Una aplicación de visión consta de una serie de algoritmos que se ejecutan secuencialmente.
Los algoritmos usan sencillos tipos de datos de entrada y de salida (imagen original, imagen etiquetada, regiones, números):
- Algorithms data types: KeysensNote_vAlgorithmsDataTypes.pdf

Algunas colecciones de algoritmos son:
- Basic algorithms: KeysensNote_vAlgorithmsBasic.pdf
- Extended algorithms: KeysensNote_vAlgorithmsExtended.pdf
- Colour calibration algorithms: KeysensNote_vAlgorithmsColorCalibration.pdf
El usuario puede crear sus propias colecciones de algoritmos, programados en C y usando las facilidades de OpenCV (Open Computer Vision Library):
- Algorithms development: KeysensNote_vAlgorithmsDevelopment.pdf
| Windows 7/8/10 | |
|
Regiones de interés. Manipulación de imágenes. Conversión de espacio de color. Segmentación. Morfología matemática. Regiones y características. Detección de formas. Clasificación por forma y color. Calibración. Filtrado. Contaje de objetos. Etc. |
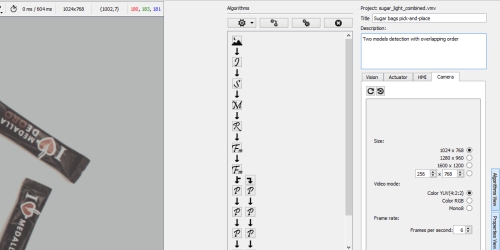
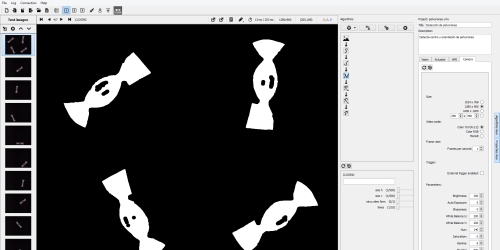
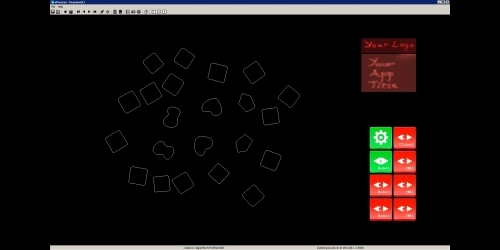
vDevelop
Simulador. Aplicación de escritorio para sistemas operativos MS Windows.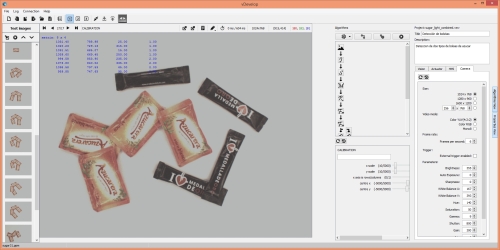
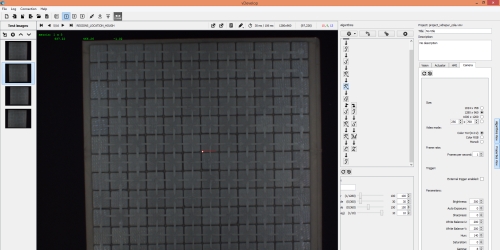
| Windows 7/8/10 | |
| Número indefinido de imágenes de prueba | |
| Secciones para procesador de visión, HMI, actuador y cámara | |
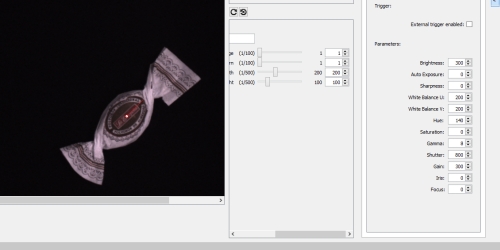
| Formación del árbol de algoritmos, visualización de resultados, ajuste de parámetros | |
| Carga y descarga de proyectos al procesador de visión | |
| Número indefinido de proyectos, imágenes resultado, resultados numéricos |
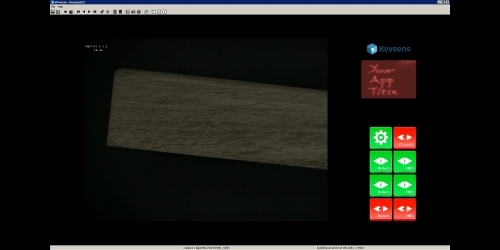
Runtimes
- RuntimeGigE: versión de desarrollador para cámaras matriciales GigE Vision.
- RuntimeGigEUser: versión de usuario final para cámaras matriciales GigE Vision.
- RuntimeLin: versión para cámaras lineales GigE Vision.


| Windows Embedded Standard 7 | |
| RAM 4GB, Intel Core i5 / i7 | |
| 3 x Matriciales GigE Vision 3 x Lineales GigE Vision |
|
| 3 proyectos simultáneos | |
| Algoritmos de visión Keysens | |
| De secuencias de imágenes De cualquier imagen resultado | |
| Todos los resultados en tiempo real | |
| TCP/IP a 3 x robot y a 3 x HMI | |
| Keysens, Keba | |
| Proyectos de visión | |
| Variable, ejemplos: 1024x768, 1280x960, 1600x1200 | |
| yuv422, rgb, mono | |
| Modificación local | |
| Modificación local y mediante tramas ethernet | |
| Mediante tramas ethernet | |
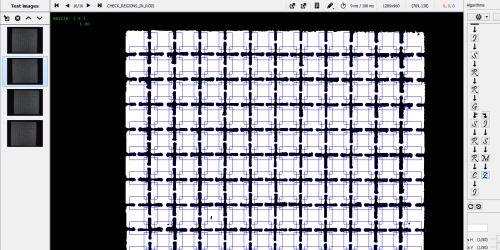
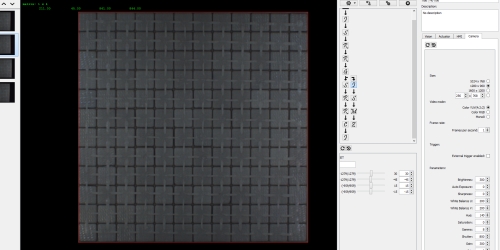
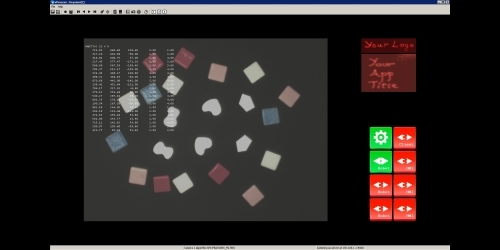
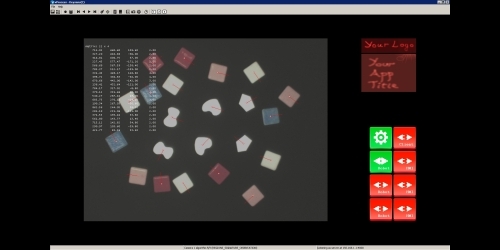
| Muestra tiempos de ejecución. Muestra características cámaras. Indicación del centro de imagen. Muestra gráfica de resultados: puntos, líneas, rectángulos, círculos. Muestra estado de conexiones. |